


Introduction
As global research institutions push deeper into embodied AI, dexterous manipulation, and human–robot interaction, the need for an open-source humanoid robot for research has never been greater. Universities today expect robotics platforms that offer not only mechanical flexibility but also open architecture, multi-modal perception, and full-stack customizability for advanced experiments.
Our wheel-based humanoid robot—featuring biomimetic 7-DOF dual arms, multi-modal sensing, central computing, and an omnidirectional mobile base—is designed specifically for these demands. It supports research in dynamic environments, mobile manipulation, AI-driven behavior learning, and embodied intelligence.
With over 1,000 robots delivered to academic and industry partners and a new batch of 8 humanoid robots entering university labs, this open-source platform continues to empower world-class robotics research.

Tianjin University
1.Designed for University Laboratories and Full-Scope Research Freedom
An open-source humanoid robot for research must be flexible, reliable, and academically friendly. Our platform was built from the ground up for higher education, enabling researchers to explore:
- advanced robotic manipulation
- autonomous navigation
- AI-based decision-making
- multimodal learning
- hardware–software co-design
- simulation-to-real transfer
Because the system is self-developed and open-source, research teams can inspect every layer—from the low-level motor commands to high-level motion planning and perception. This academic openness is particularly valuable for graduate research, PhD projects, robotics competitions, and interdisciplinary AI studies.
The robot’s modular architecture encourages customization, making it ideal for long-term lab deployments and collaborative scientific research.

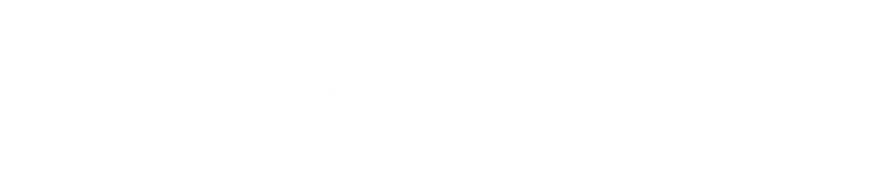
2.Biomimetic 7-DOF Dual-Arm Structure with Realistic Motion and Simulated Force Feedback
A standout feature of our open-source humanoid robot for research is its 7-DOF biomimetic dual-arm system, which mimics the natural structure of human shoulders, elbows, and wrists. This achieves human-like dexterity, enabling complex tasks such as object manipulation, coordinated dual-arm operation, and dynamic interaction in research environments.
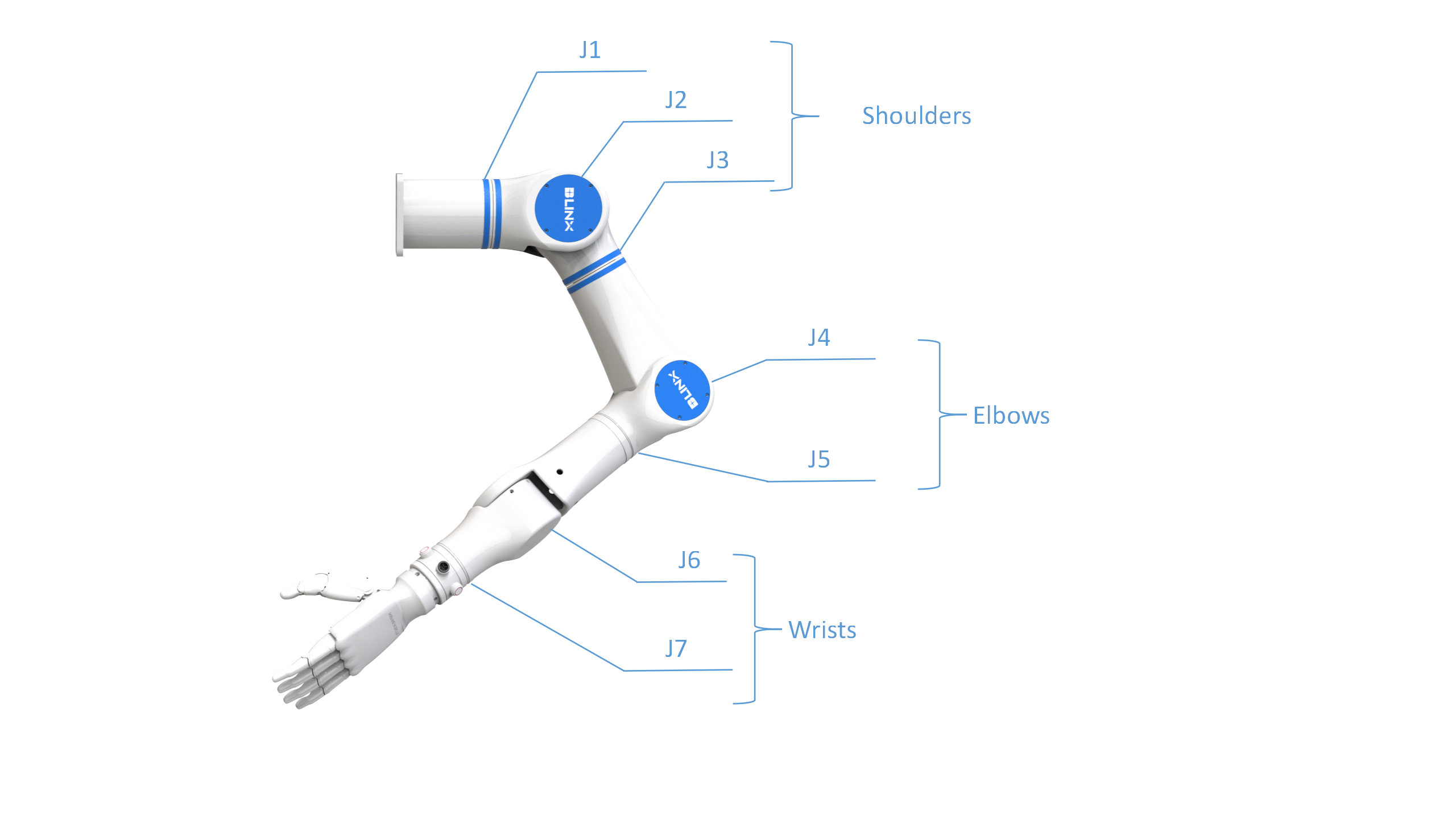
Although the arms do not include physical force sensors, the system features:
- simulated force feedback
- contact response modeling
- virtual tactile information streams
- software-level collision approximation
These capabilities allow researchers to experiment with:
- compliant control algorithms
- bimanual coordination
- machine-learning-based manipulation
- motion prediction and adaptation
- deformable-object handling
The simulation framework allows students and researchers to test algorithms safely before deploying them on the real hardware—making it a highly efficient research tool.
3.Multi-Modal Perception and High-Performance Computing for Real-Time Intelligence
The robot integrates multiple perception modules—including vision, IMU, depth sensing, and environmental feedback—enabling it to operate in dynamic, unstructured environments. The central computing unit supports modern AI workloads, robotics middleware, and deep-learning frameworks.
This allows researchers to explore cutting-edge topics such as:
- embodied AI and vision-language-action models
- reinforcement learning for manipulation and locomotion
- semantic perception and context-aware navigation
- multimodal fusion networks
- real-time scene understanding
Whether students are developing SLAM algorithms or experimenting with generative AI for robotics, the platform provides the compute power and flexibility required for high-level experimentation.
4.Omnidirectional Mobile Base for Advanced Autonomous Navigation
Built on a stable, energy-efficient omnidirectional base, the robot supports complex mobility studies without the limitations of biped robots. It is especially suitable for:
- dynamic obstacle avoidance
- semantic navigation in indoor environments
- autonomous map building
- mobile manipulation in tight spaces
- multi-agent robotics research
The mobility system makes the robot ideal for long-running experiments, robot fleets, real-time planning challenges, and embodied AI benchmark testing—common requirements in modern university robotics programs.
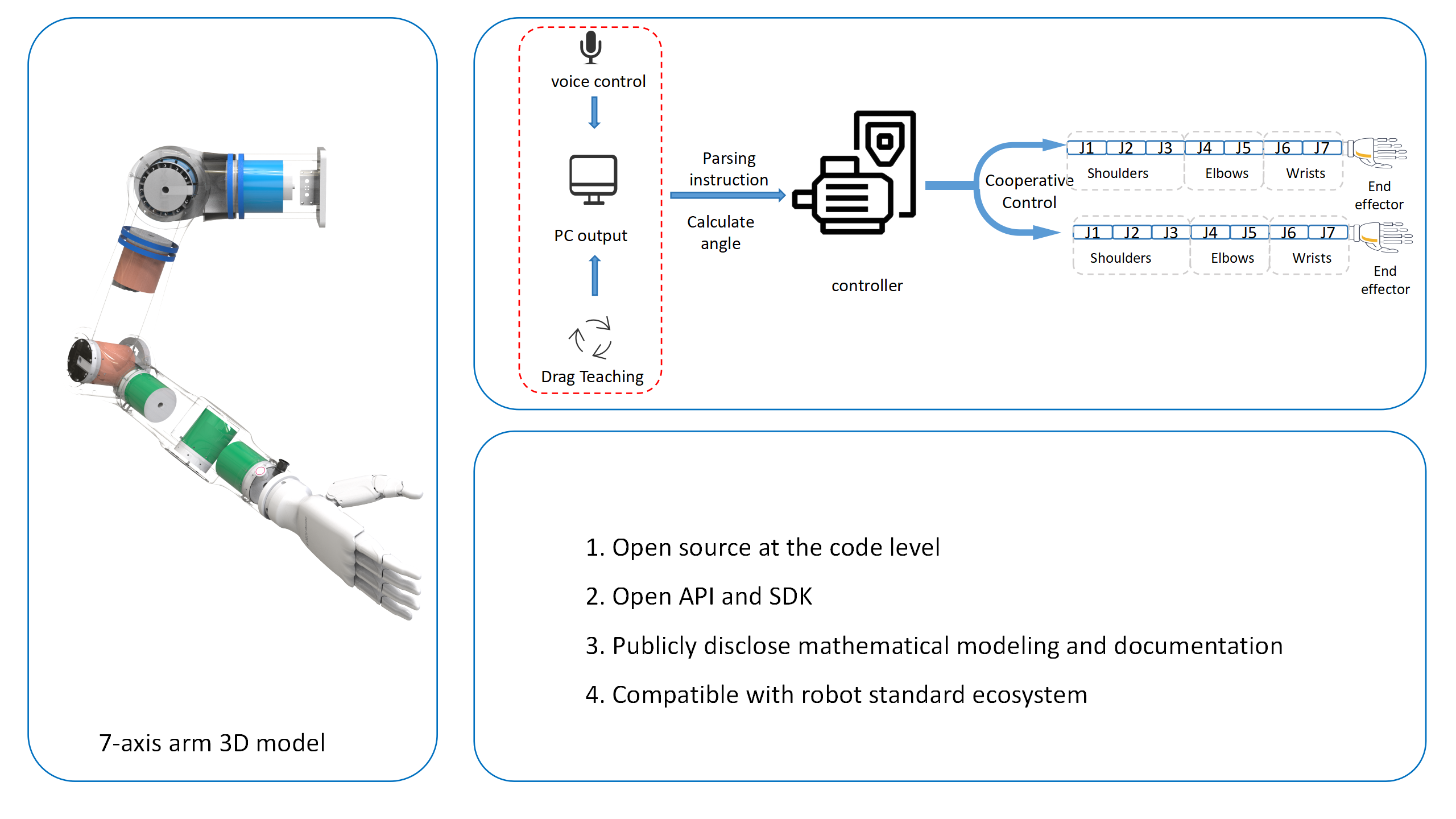
5.Open-Source Architecture for Total Academic Control
True to the concept of an open-source humanoid robot for research, the robot offers access to:
- motion control source code
- robot operating system interfaces
- navigation and perception frameworks
- simulation environments
- API-level access for full-stack development
Optional hardware documentation may be provided for specific academic collaborations, enabling institutions to explore mechanical optimization, embedded control, or custom sensor integration.
This open ecosystem empowers research groups to redesign, reprogram, or reconfigure the robot according to their exact study requirements.
6.Proven Reliability: More Than 1,000 Robots Delivered Worldwide
With a deployment record exceeding 1,000 robots, our company demonstrates a level of reliability and experience unmatched in many emerging robotics suppliers. The newly delivered batch of 8 humanoid robots marks another milestone in supporting university robotics programs.
This volume reflects:
- a mature supply chain
- strong manufacturing capabilities
- scalable production
- long-term customer support infrastructure
Such consistency is critical for universities that must maintain research continuity over multiple academic years.

7.Suitable for Interdisciplinary Research Across Robotics, AI, HRI, and Automation
The robot’s design enables research across diverse fields, including:
- computer vision
- robotic manipulation
- cognitive robotics
- automation engineering
- human–robot collaboration
- machine learning for control
- motion synthesis and behavior generation
Its ability to function in real-world laboratory environments makes it a strong foundation for master-level and doctoral-level research projects.
8.Contact Us for Collaboration, Research Partnership, or Purchase
We welcome universities, R&D institutions, and robotics labs to collaborate with us.
- Website: www.bofengtech.com
- Email: [email protected]
If your team needs an open-source humanoid robot for research, our experts can help with lab planning, deployment, customization, and technical support.