

1. Overview
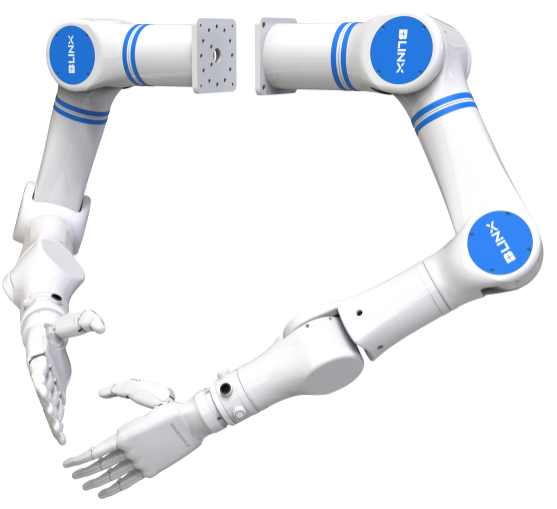
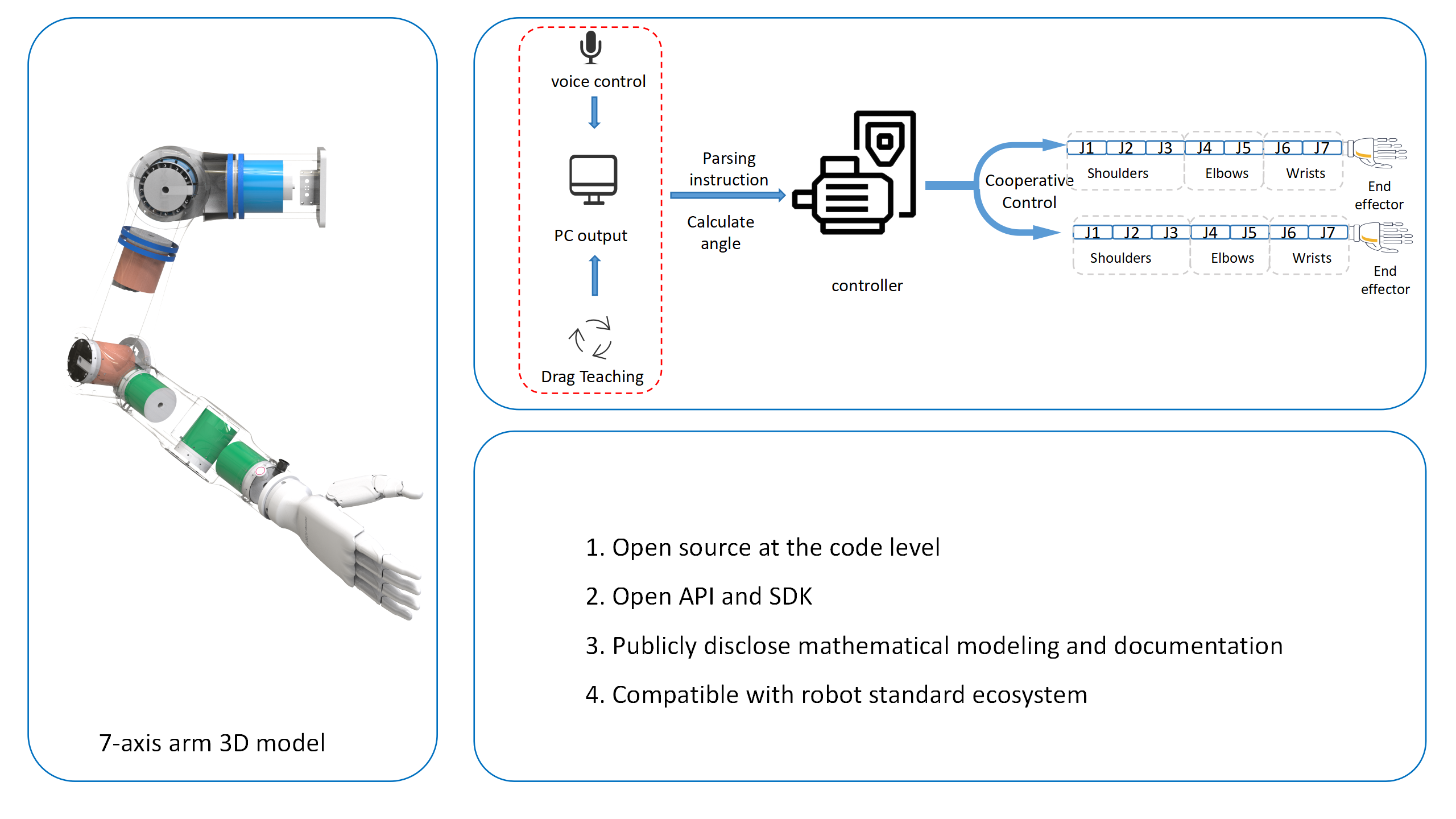
This product is a 7-axis robotic arm specially designed for humanoid robots. It precisely replicates the structure and degrees of freedom of human shoulder, elbow, and wrist joints, offering an exceptional level of flexibility and dexterity.
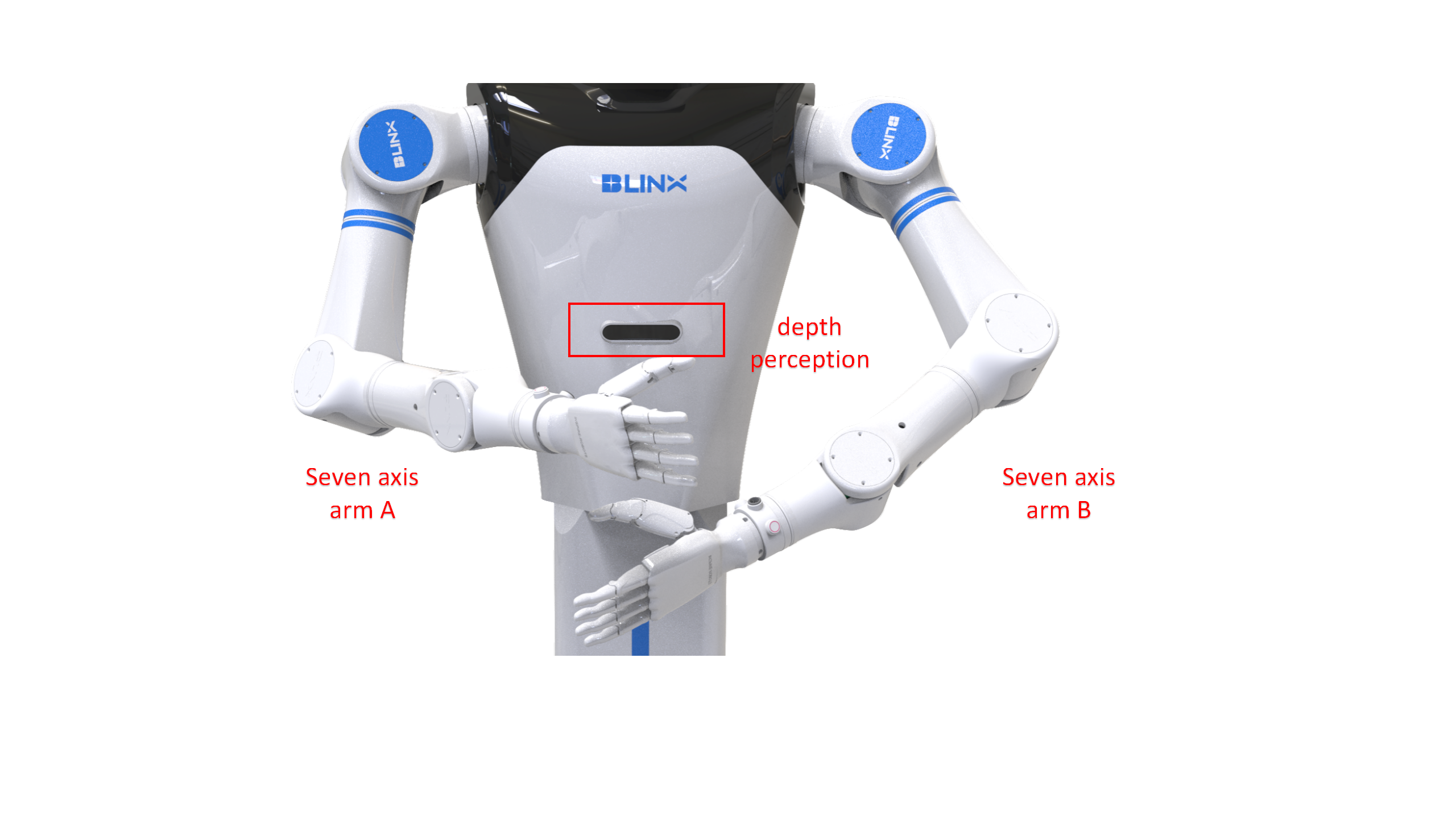
The arm features a dual-arm control system, allowing one controller to manage two robotic arms simultaneously. This design enables highly coordinated dual-arm operation and effective collision avoidance. Additionally, the robotic arm is equipped with electronic skin for pre-collision sensing. During operation, it can detect the distance to nearby humans in real-time, automatically stopping if the distance is ≤10cm to ensure maximum safety.
Moreover, the system offers open access to motor-level fine control, kinematics, and dynamics control algorithms. It can seamlessly integrate with various mobile platforms, vision systems, voice interaction modules, and multiple sensors. This makes it highly versatile and suitable for education, research, service, manufacturing, logistics, and medical applications.
2. Key Features and Functions
1) Fully Humanoid Design
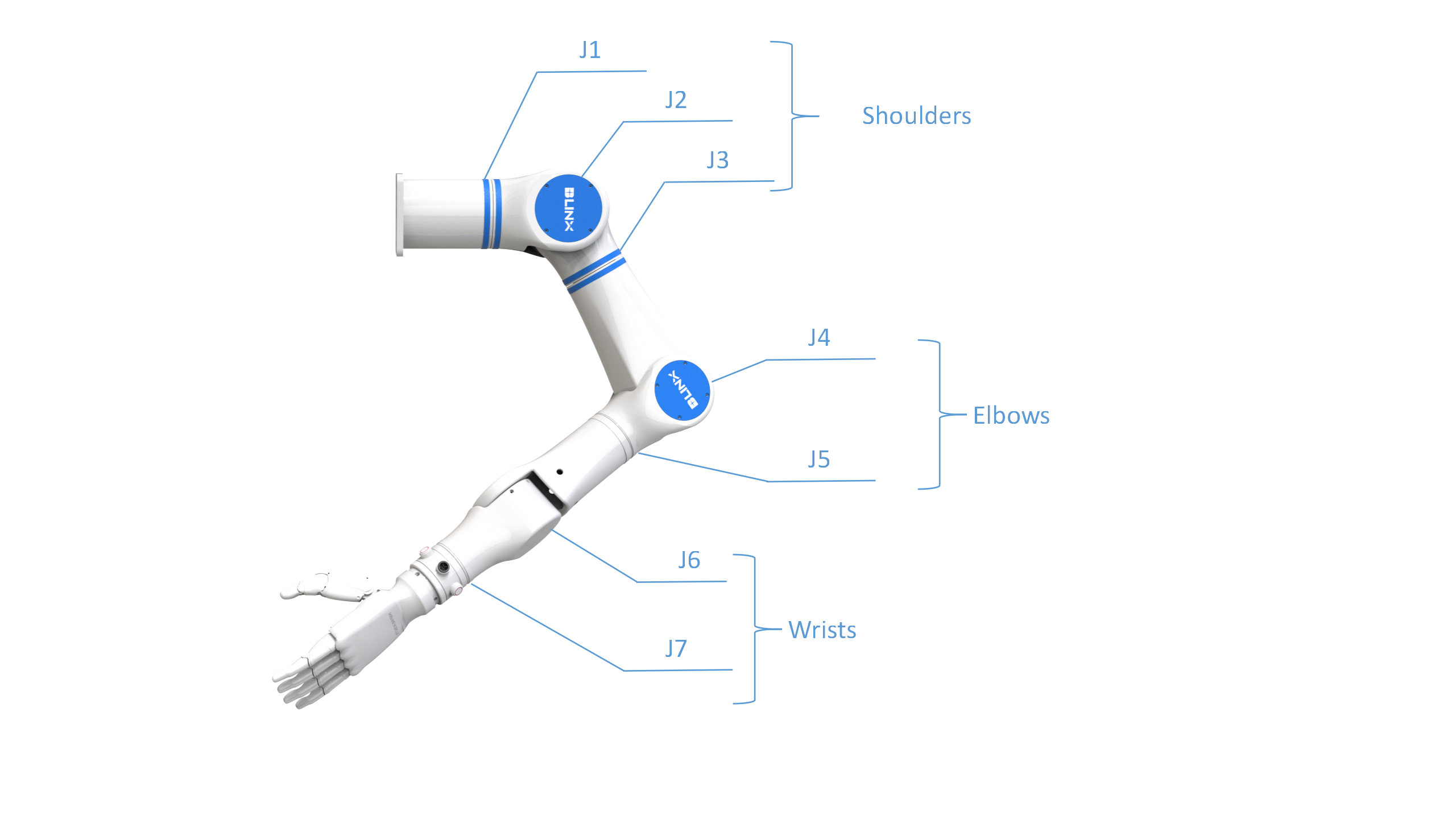
The robotic arm includes three major joints — shoulder, elbow, and wrist — with a total of seven degrees of freedom. It replicates the flexibility of a human arm, enabling complex, lifelike movements. This design supports rapid development and integration for humanoid robots, significantly reducing development cycles.
2) Dual-Arm Controller
The integrated controller supports a one-controller-two-arms setup, allowing synchronous control of two 7-axis robotic arms to execute high-precision collaborative tasks. Compared to traditional solutions, this saves space, reduces hardware costs, and inherently supports dual-arm cooperation.
- Controller dimensions: 164 × 147 × 48 mm
- 14 I/O channels
- Motion command response time: ≤1 ms

3) Dual-Arm Collaboration with Depth Vision
With dual-arm control and advanced trajectory planning, collision detection, and obstacle avoidance algorithms, the system can simulate human arm flexibility and coordination. Paired with a depth vision system, it provides real-time environment and object sensing, enabling more complex and precise operations.
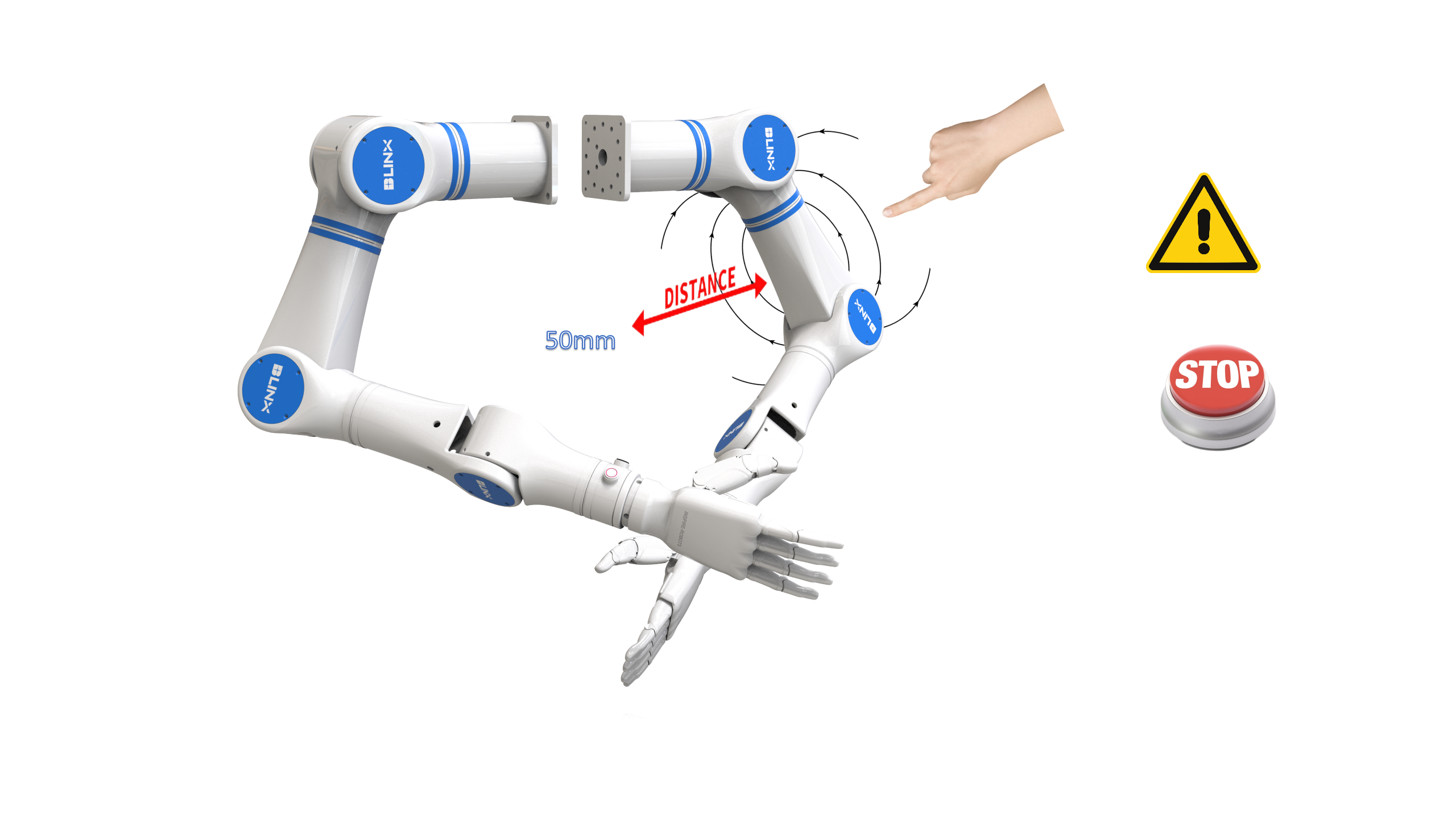
4) Electronic Skin
The robotic arm is covered with capacitive electronic skin made of highly sensitive flexible sensing material, capable of detecting object proximity within 5 cm to 15 mm. This centimeter-level spatial awareness combined with a dual-layer protection mechanism (pre-contact warning and emergency stop on contact) greatly enhances human-robot safety in collaborative environments.
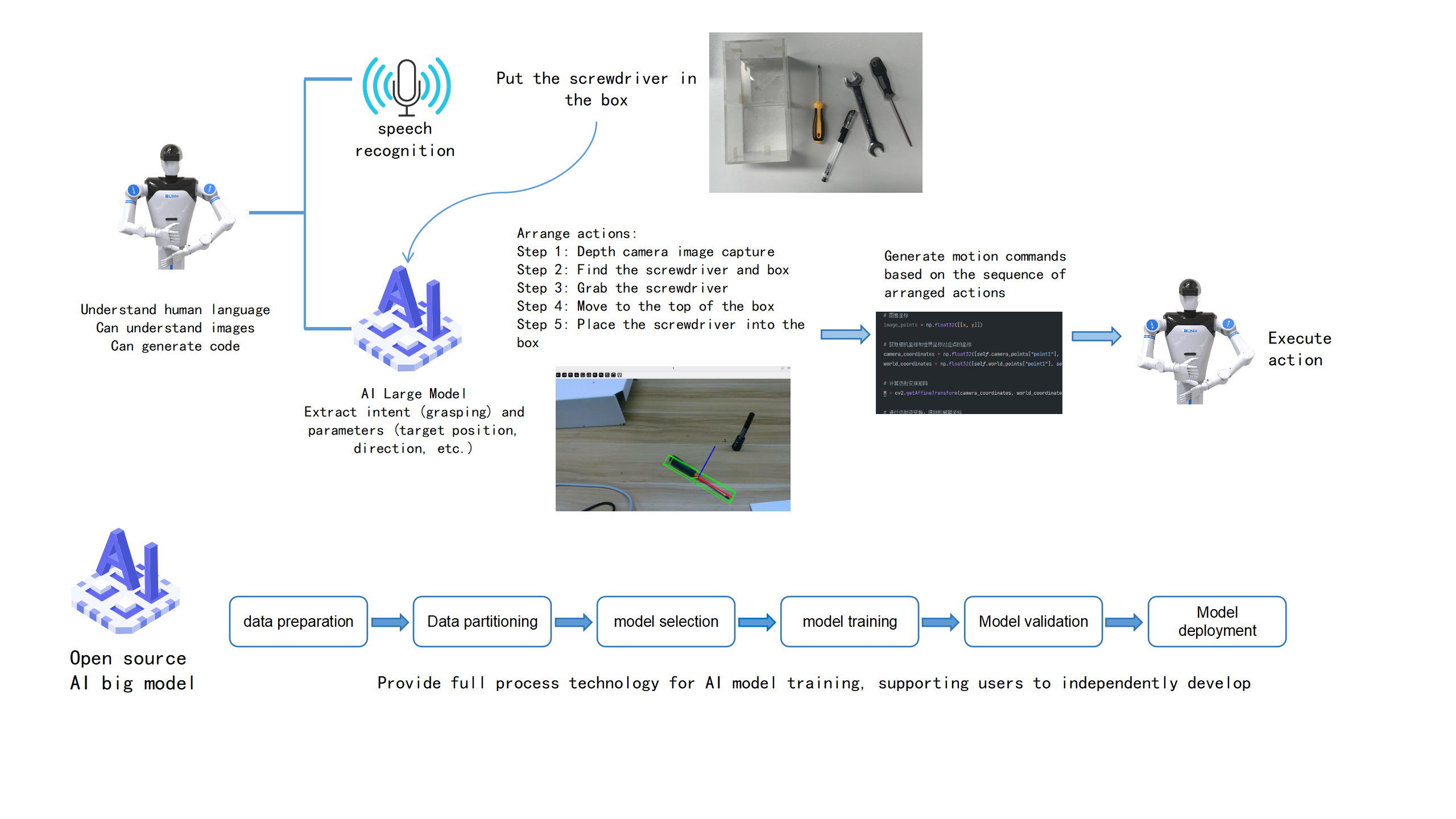
5) Integration with Large Embodied AI Models
The arm is deeply integrated with open-source large AI models like DeepSeek. Through SDK training, the robotic arm can interpret complex user instructions, infer real intentions, autonomously plan motion trajectories, and make decisions with intelligent feedback. Additionally, it provides a full workflow for custom AI model training, including data collection, training, verification, and deployment with vision and voice sensors.
6) Open-Source Control Algorithms
The system offers open-source code for motor control between joint modules and the controller, as well as for forward and inverse kinematics models. This open ecosystem allows users to engage in advanced research and development across both hardware and software layers of humanoid robotics.
3. Technical Specifications
| Parameter | Specification |
|---|---|
| Degrees of freedom | 7 |
| Repeatability accuracy | ±0.1 mm |
| Payload | 5 kg |
| Working radius | 513 mm |
| Arm length | 850 mm |
| Self-weight | 12 kg |
| End effector compatibility | Two-finger grippers, five-finger dexterous hands, and more |
| Power supply | External power |
| Supply voltage / current | 24V / 25A DC |
| Max power consumption | 600W Max |
| Material | Aluminum alloy |
| Operating environment | -10℃ to 55℃ |
| Installation orientation | Any position |
| Communication | WiFi / RJ45 |
| Control method | PC-based control |
| Base dimensions | 100 mm × 100 mm |
Joint range of motion:
- J1: ±179°
- J2: ±96°
- J3: ±179°
- J4: ±94°
- J5: ±179°
- J6: ±91°
- J7: ±179°