Professional supplier of AI and robot teaching equipment
Professional supplier of AI and robot teaching equipment


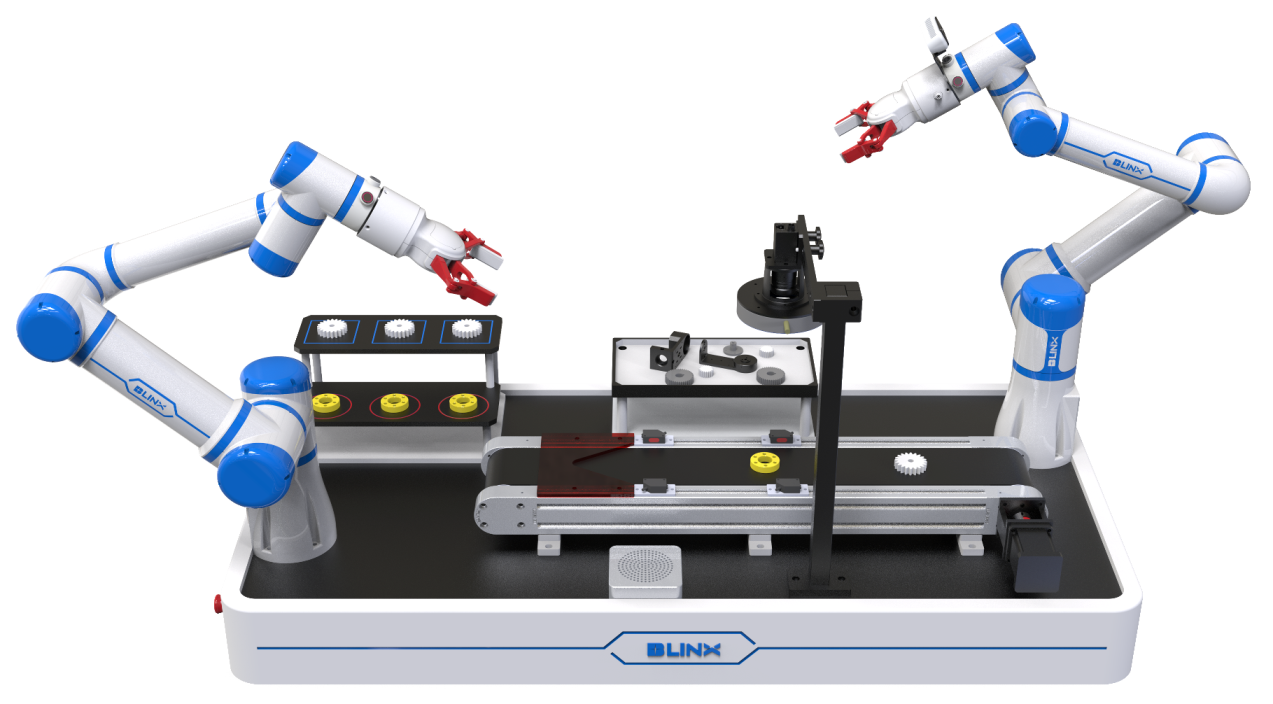
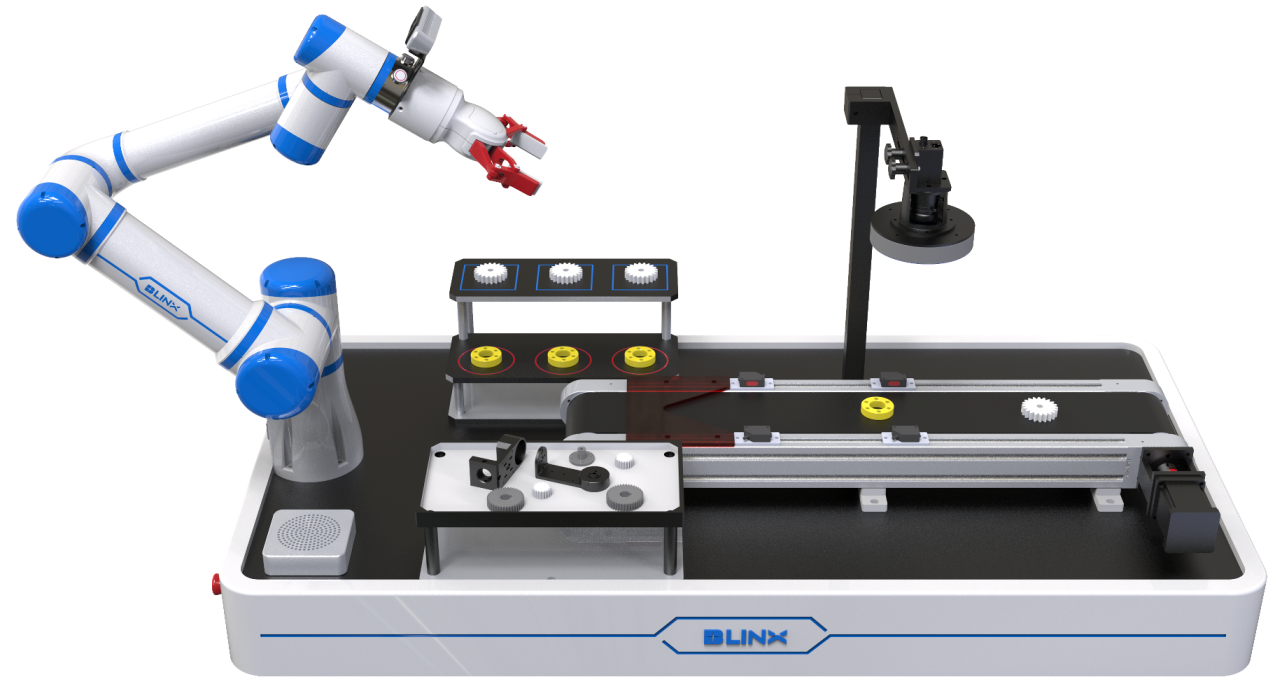
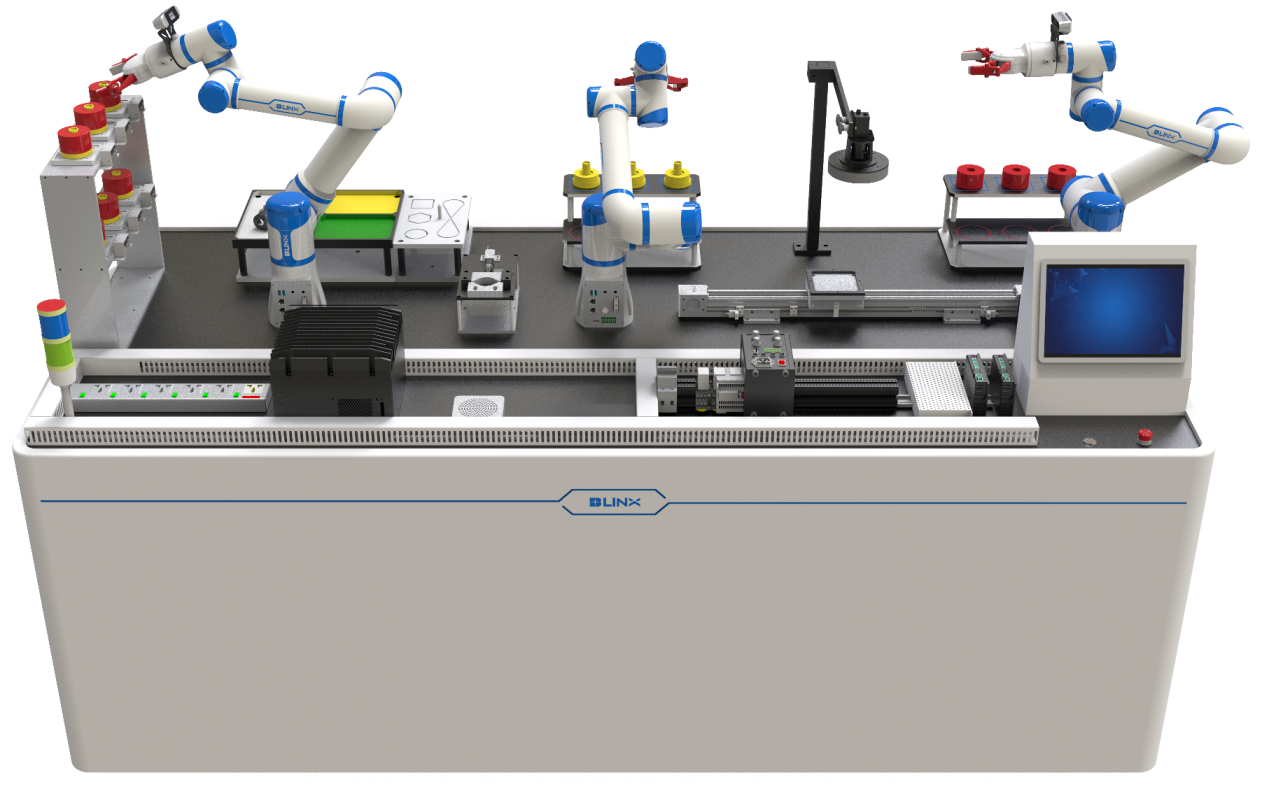
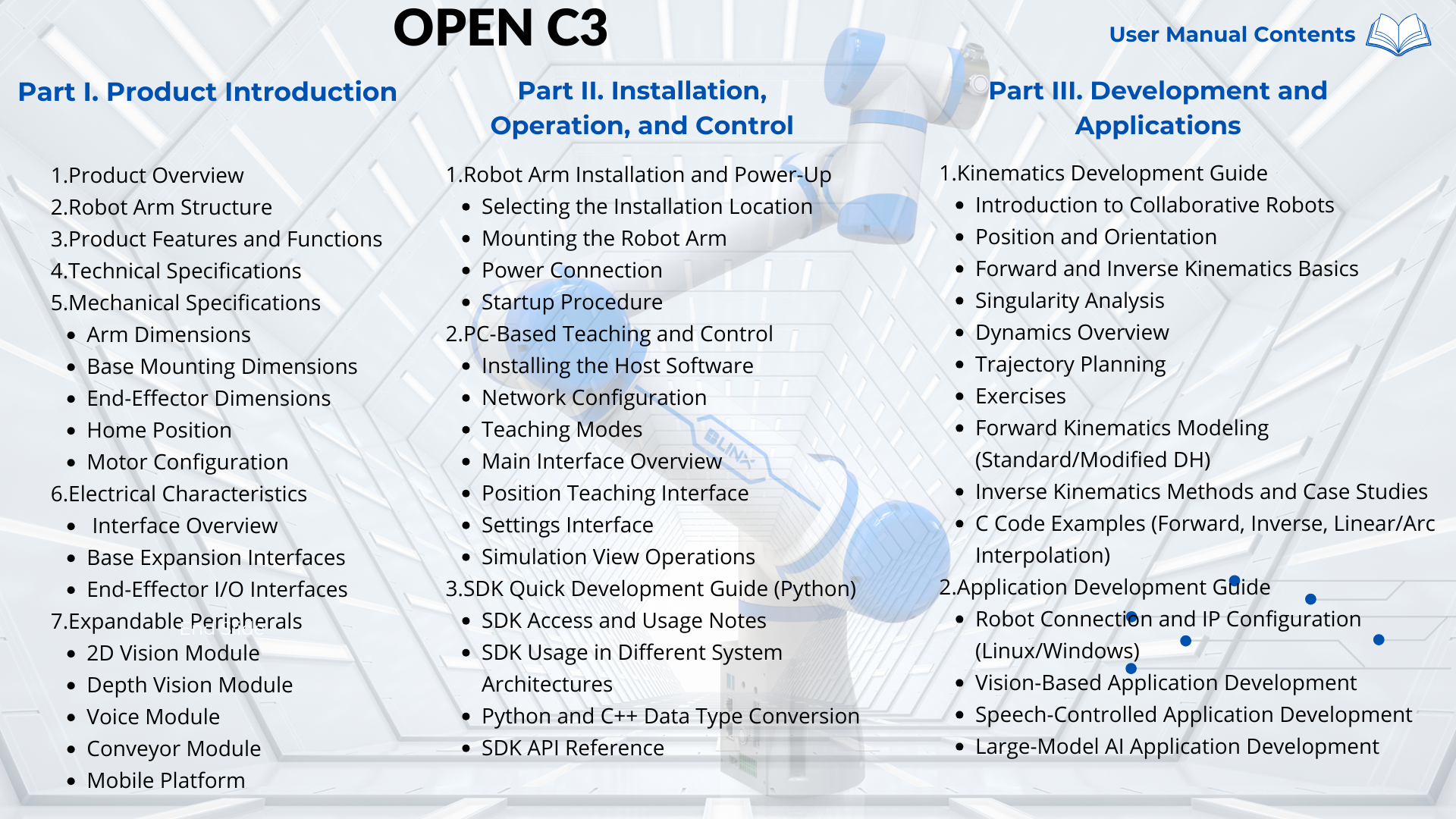
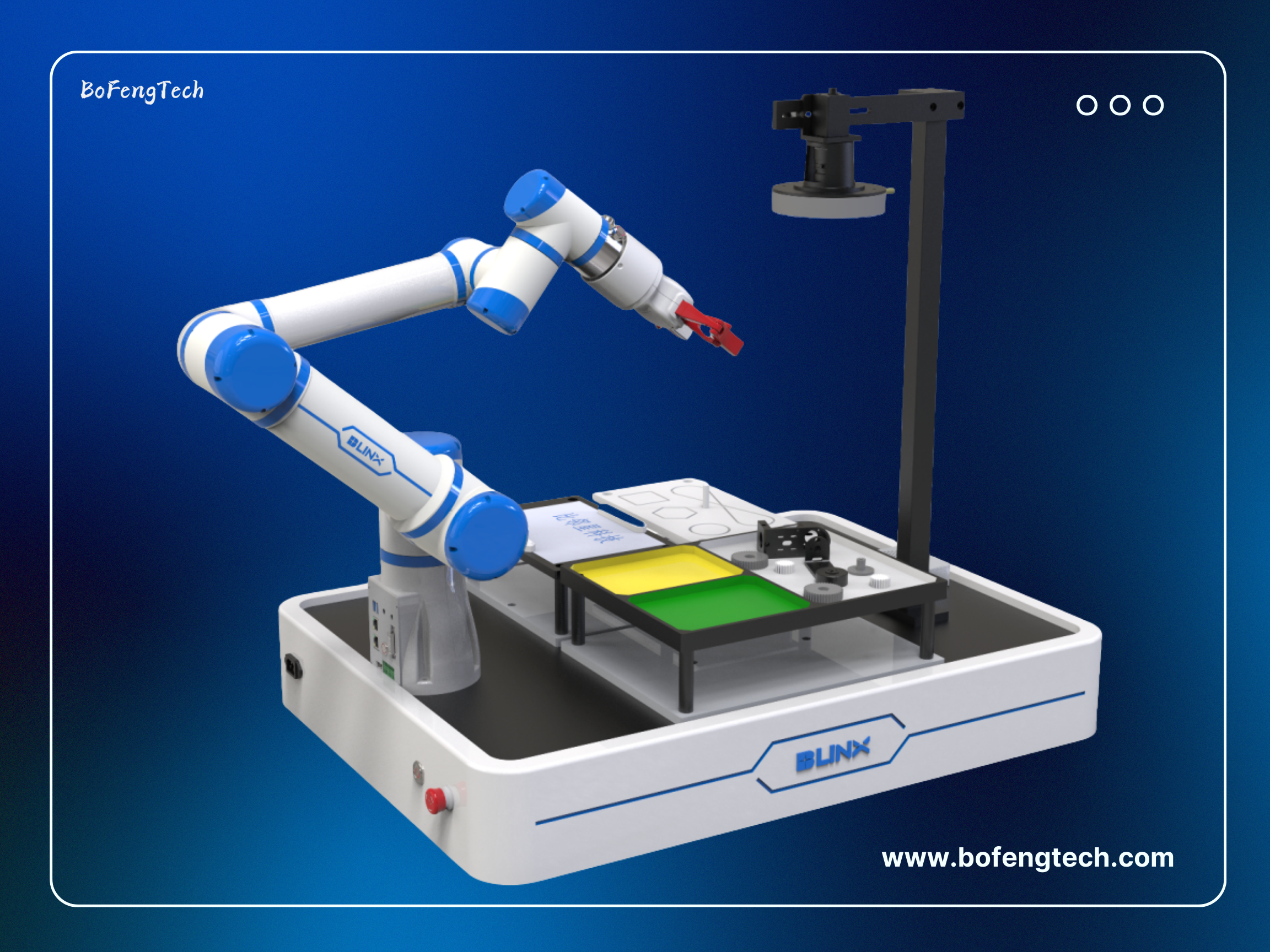
The Collaborative Robot Arm is specifically developed for education and research, integrating open-source AI large model technology. It offers full access to the robot’s mechanical structure, motor control, and kinematics algorithms, while delivering industrial-grade performance. The arm provides multiple expansion interfaces, supporting peripherals such as vision, voice, and sensor modules, making it ideal for teaching, research, production line integration, and assembly applications.
Featuring a built-in robot controller housed in the base, the design reduces overall size, ensures stable operation, and simplifies setup across various scenarios, saving installation space, debugging time, and cost. With open-source control algorithms, users can access 3D mechanical models, motor and joint control source code, and kinematics forward/inverse solution code. This comprehensive openness allows educators, students, and developers to engage in advanced robotics research and hardware/software development.
Axes
6
Maximum Payload
3.0 kg
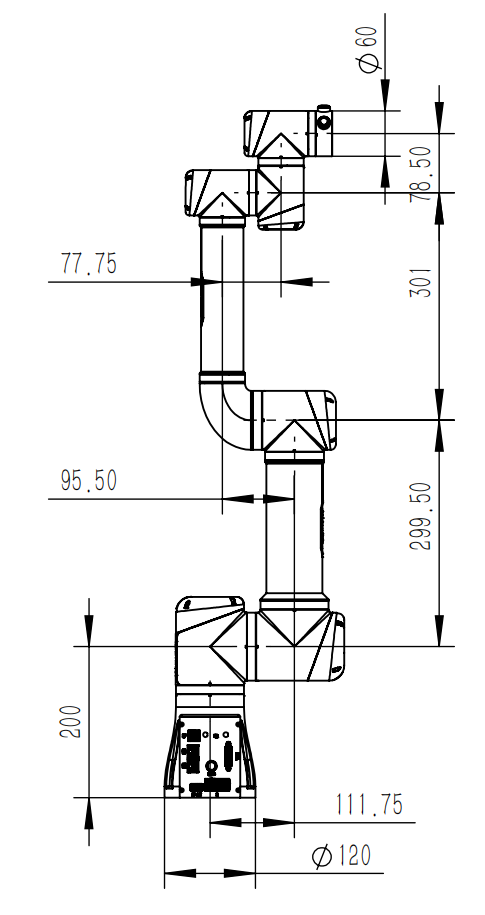
Working Radius
680 mm(26.77in)
Weight
15 kg
Repetitive Positioning Accuracy
±0.02 mm
Supply Voltage
24 V/18 A DC
Rated Power
450W Max
Material
Aluminum Alloy
Working Environment
-10℃~70℃ (14°F~158°F)
Controller
X86
Communication Method
WiFi/RJ45
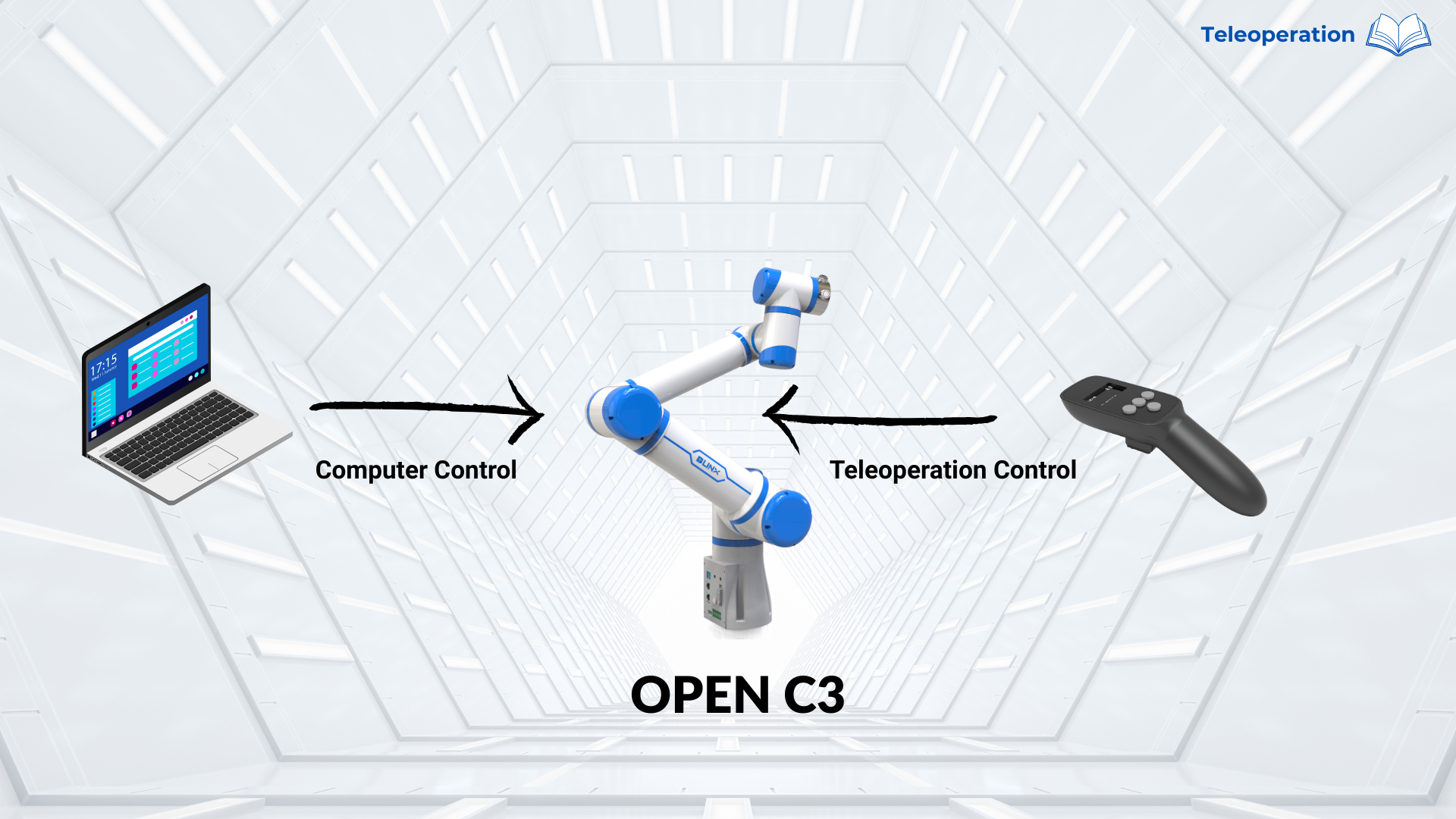
Control Method
PC Control Software/Teach Pendant Control/Remote Controller Control
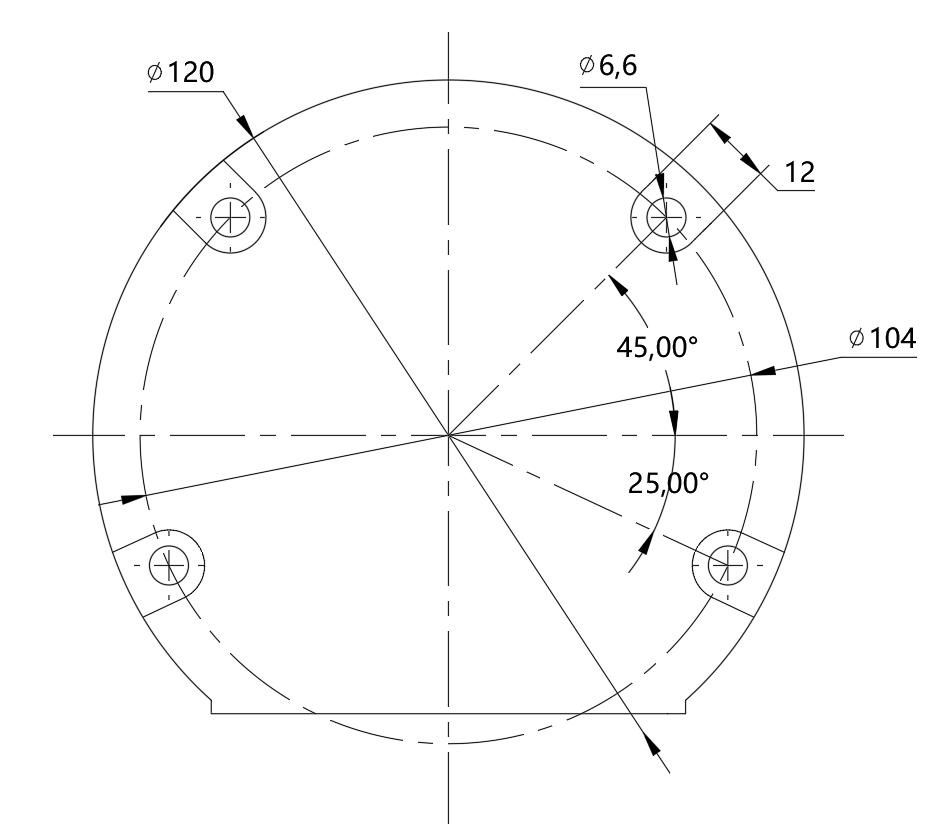
Base Dimensions
120 mm×120 mm(4.72in×4.72in)
Maximum range of joint motion
J1:±175°
J2:±120°
J3:±150°
J4:±175°
J5:±175°
J6:±175°

The robotic arm is specifically developed for education and research, integrating open-source AI large model technology. It provides full access to the mechanical structure design, motor control, and kinematics algorithms, while maintaining industrial-grade performance.
With multiple expansion interfaces, the arm supports peripherals such as vision systems, speech modules, and various sensors, making it suitable for a wide range of applications, including teaching, scientific research, production line integration, and assembly operations.
The robot controller is fully integrated into the base, significantly reducing the overall size of the robotic arm. This compact design ensures more stable operation and greatly simplifies system setup across different application scenarios. Users do not need to allocate additional space for the controller, thereby saving installation time and reducing costs.

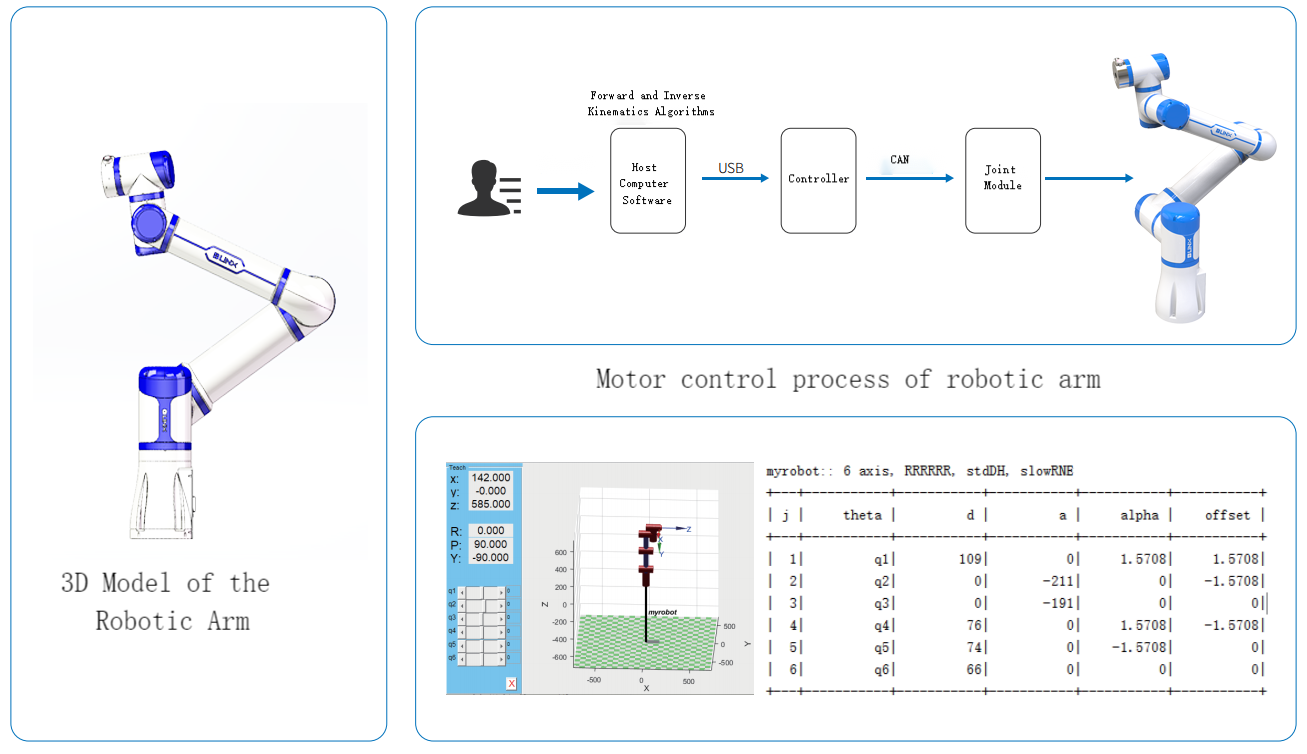
The system provides 3D structural design models and opens full access to the source code for motor, controller, and joint-level control. In terms of kinematics, the source code for forward and inverse kinematics models is available. This comprehensive openness enables users to engage in robotics research and development at both the hardware and software levels.
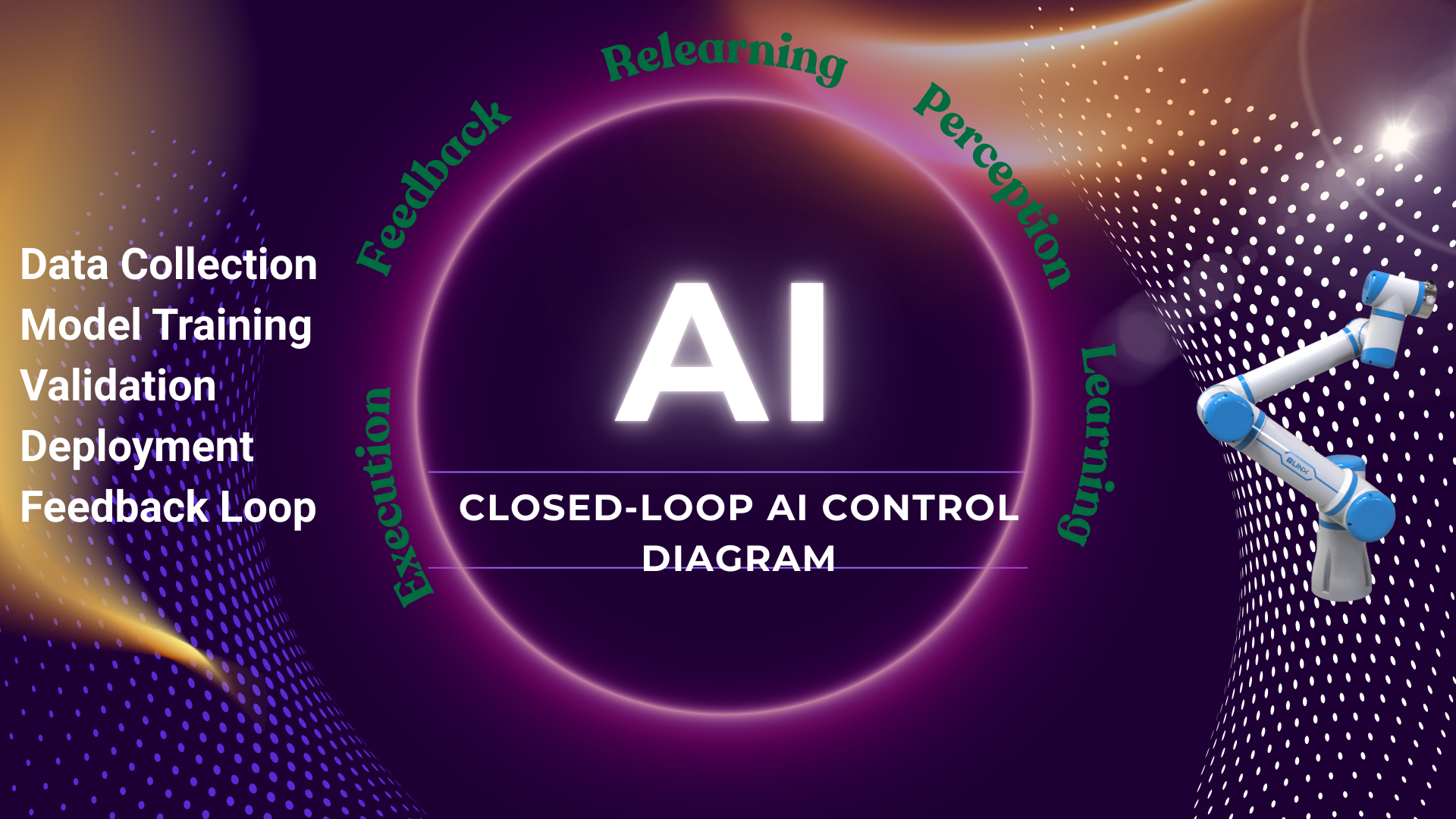
The robotic arm is deeply integrated with open-source AI large model technology. Through a dedicated SDK trained by AI models, the arm is capable of autonomously generating code and executing tasks. Additionally, the system provides a complete technical workflow for AI model training, including integration of vision and speech sensors, data collection, model training, validation, and deployment. This allows users to tailor AI models according to specific application scenarios.
The robotic arm is equipped with an open-source teleoperation system that creates realistic and reliable human–robot interaction scenarios. Compared with traditional robot control methods, this system offers high-precision motion tracking, real-time dynamic force feedback, safety, and ease of use, making it suitable for applications in remote healthcare, remote services, and space exploration.
The product also opens access to teleoperation controller sensor data acquisition, communication protocols with the robotic arm, and motion control SDKs, fully meeting the needs of users for in-depth study and advanced research.




This six-axis collaborative robot is ideal for university and vocational school teachers, robotics and AI researchers, as well as students in engineering, automation, AI, and related fields. It is also suitable for training centers and companies that require hands-on robotics education or prototyping.
Integrated controller and robot body – The all-in-one design allows for more flexible installation.
Higher degree of openness for educational use – Open-source access with accompanying course guides makes it ideal for teaching.
More mature product variants – Offers a wider range of options for classroom and lab applications.
Better cost-performance ratio – Provides high quality at a more affordable price.
We provide comprehensive technical support, including:
Detailed user manuals and wiring/interface guides.
Pre-configured ROS environment for quick setup.
Wireless remote control and hand-gesture synchronization guidance.
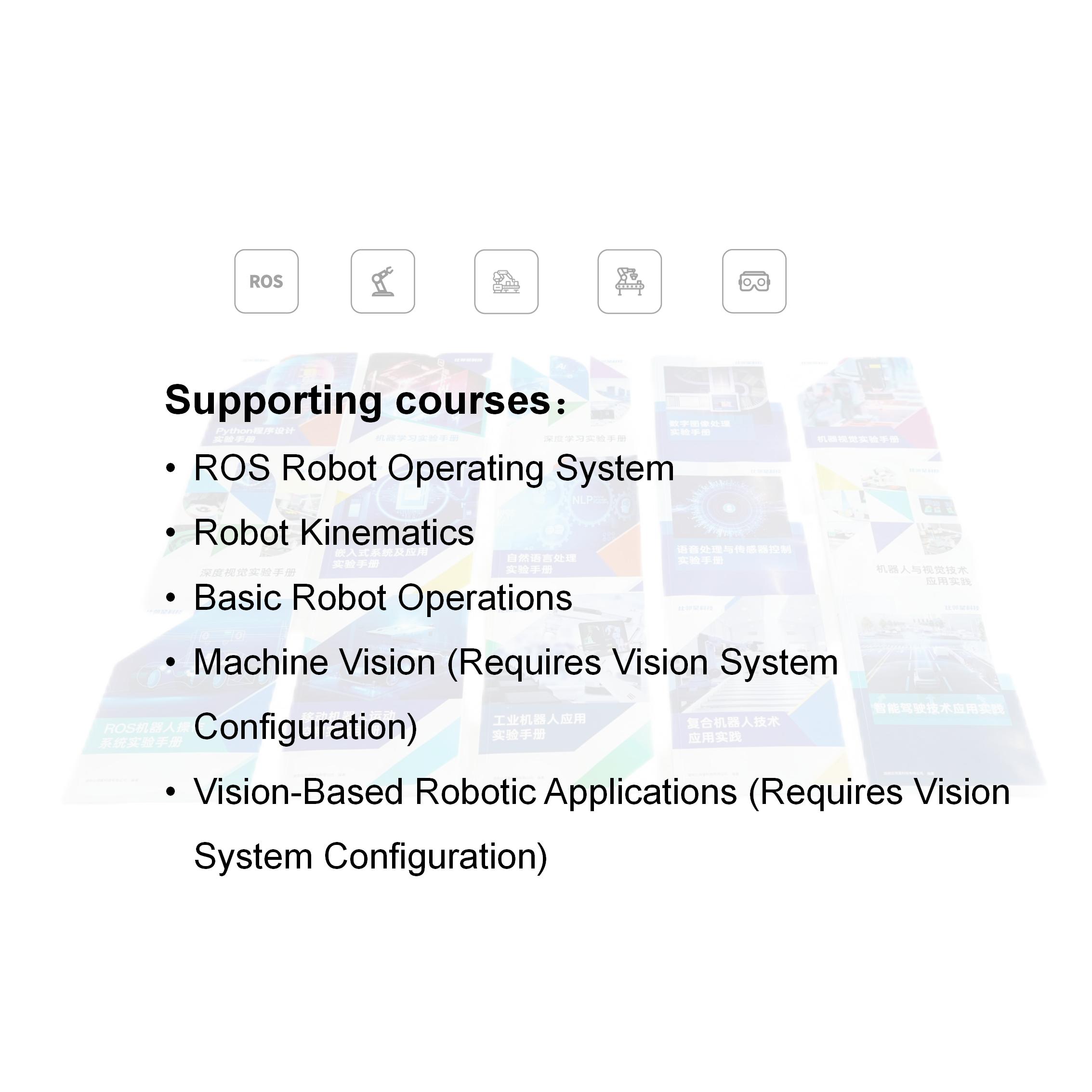
A set of ready-to-use educational experiments: at least 7 ROS-based experiments, 9 robotics kinematics experiments, and 5 basic operations exercises.
Software updates and troubleshooting assistance.
Vision systems (cameras) for computer vision and AI applications.
Voice modules for speech recognition and control.
End-effectors and grippers for material handling, assembly, or other tasks.
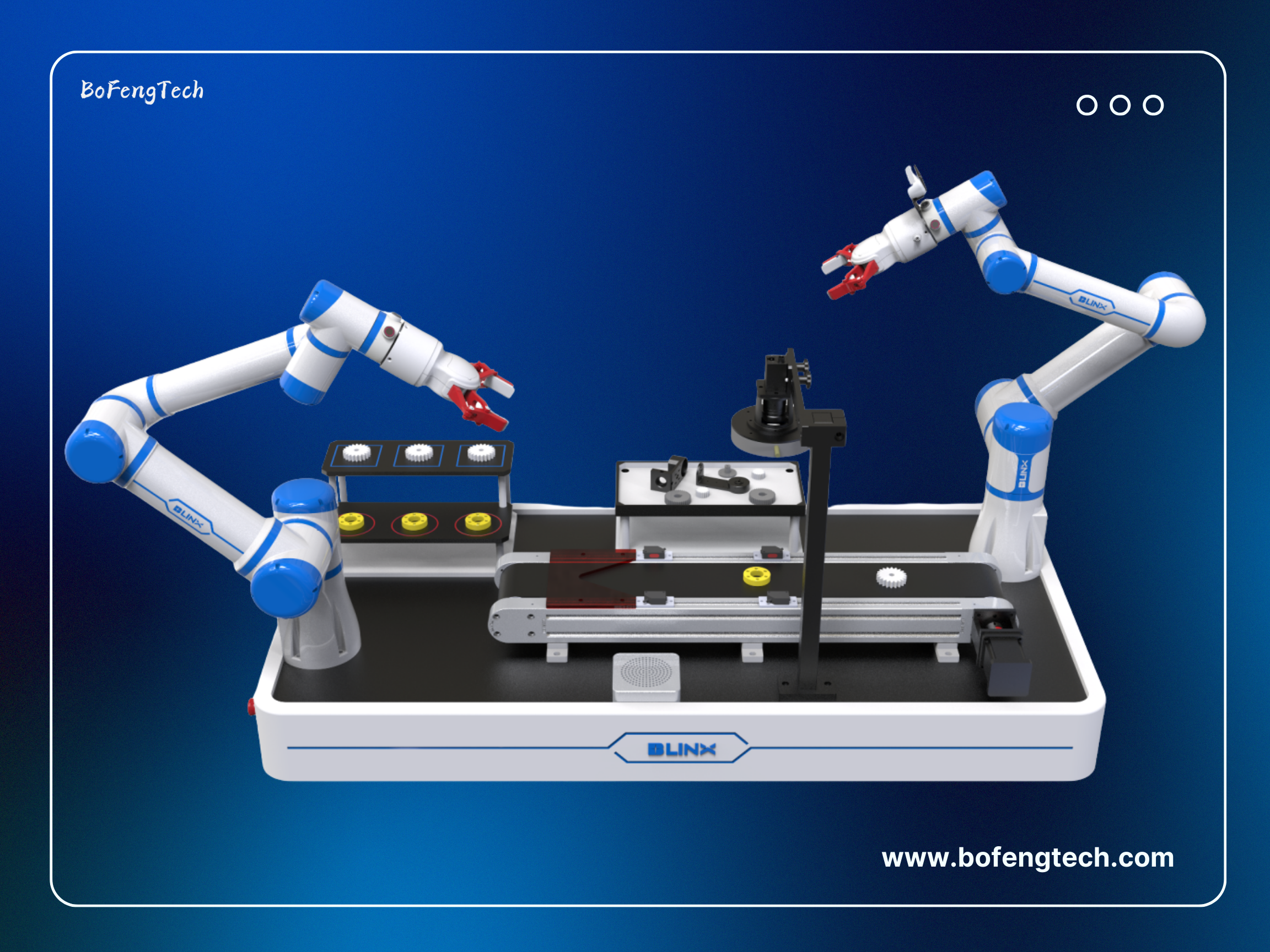
Conveyor belts and automation teaching platforms.
Sensors and IoT modules for experimental and research purposes.
Large AI models for intelligent perception, decision-making, or control applications.
Flexible deployment on different carriers, such as fixed platforms, mobile vehicles, or linear rails, to suit various experimental and teaching scenarios.
The materials are currently being uploaded. For further information, please feel free to contact us via email.
Please submit your download request, and we will send the relevant information to your email within 2 business days.